David Hodo
Indoor Navigation for SUGVs
Project Sponsors:
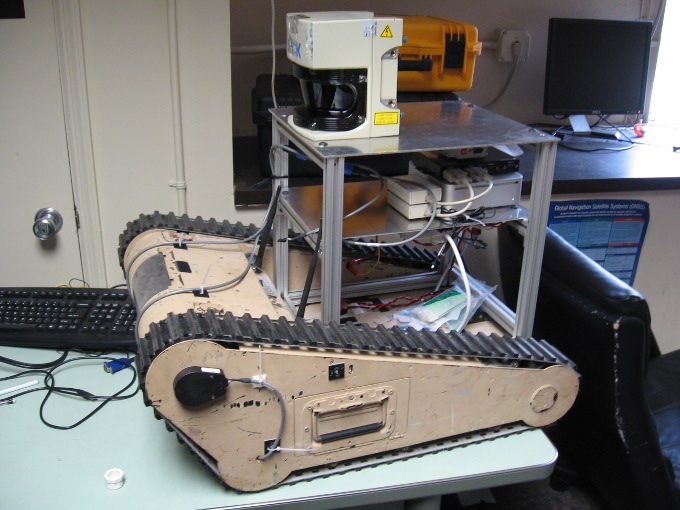
Project overview
The goal of this project is to build a navigation system, which does not rely on GPS and can provide accurate position and orientation estimates for a small tracked robot traveling at slow speeds (
< 4m/s). The system should be relatively low cost with the cost of the sensors, not including the robot they are placed on being < $15,000. The system should also be small with all components togetherfitting in a space smaller than 150mm150mm 150mm. The devices together should also draw less than 50W of power.
Quick Links